你知道夹娃娃机吗?那些骗你零花钱的把戏。它们可能是你所知的最接近机器人的东西。当然,它们并不是真正的机器人,但是它们的确和机器人有相似之处。比如说,它们没办法敏捷地抓取物体。

作为人类,可能你会觉得随手从桌上拿起一张纸是非常容易的事。但是想象一下,让机器人来做这件事。这就不容易了。问题是,很多机器人都被教导要用超专业的算法来完成单一的任务。但很明显,你没办法让机器人去处理它遇到的所有问题,没办法教它们拿起物体。因为这是人工智能要做的事。
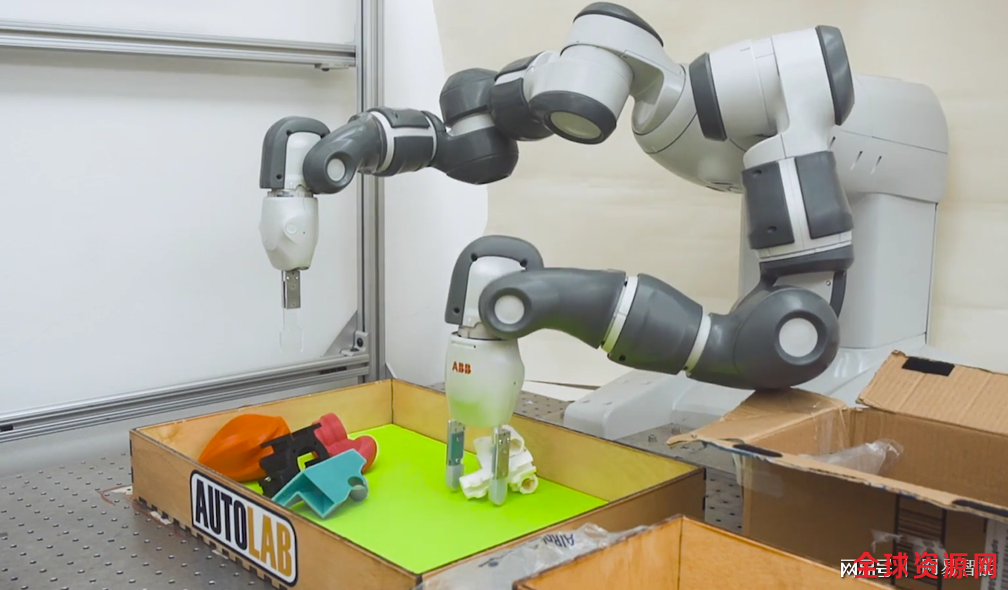
加州大学伯克利分校的研究人员给一个机器人装上了人工智能系统,这样它就能知道如何用力抓取它以前从未见过的物体,而无需借助把手等工具。机器人专家想要开发出能够掌控周围环境的真正智能又灵巧的机器人,这是一件了不起的事情。秘诀在于,用一组点云数据库来代替物体,研究人员再把这些数据输入到神经网络中。
“它的训练方式是在基于点云数据库,然后掌握它。”机器人专家KenGoldberg说,他和博士后JeffMahler一起开发了这个系统。“因此,现在我们向它展示点云,它就明白如何用力抓取物体了。‘用力’也成了操作指令之一。”这个团队不仅仅是要让机器人抓取物体,更是在寻找实现这一点的最好方式。
利用这个神经网络和微软的Kinect3-D传感器,机器人得以观察物体,并确定抓取的力度。当它充满信心时,可以保证在100次中有99次抓取成功。Goldberg表示:“机器人在这么做的时候,其实并不知道这个物体是什么。它只是把这个物体看作是空间中的一堆点,并选择抓取某一堆。所以不管这个物体是一张皱巴巴的纸巾还是什么,都无所谓。”
想象一下,有一天机器人会潜入我们的家中,帮我们做家务,不只是像扫地机器人Roomba那样扫扫地,它还能洗碗、收拾杂物,以免老人被绊倒。
机器人会遇到很多新奇的东西,而亲爱的人类懒得费心去一一教会它们。通过自学,它们可以更好地适应周围的环境。精准度至关重要。如果机器人在洗碗,却只能100次中握住盘子50次,那么结果将是非常尴尬的,一半的餐具都毁了。但这正是未来发展的有趣之处。
机器人不是单独工作和学习的,它们会被连接到云端,以便共享信息。举个例子,一个机器人学会了怎么样叠好衬衫。然后,它可以将这个知识传播给其他机器人,甚至是完全不同的机器人。通过这种方式,联网机器不仅可以成为全球化的劳动力,还可以拥有全球化的思维。当然,目前机器人还在适应这个世界。
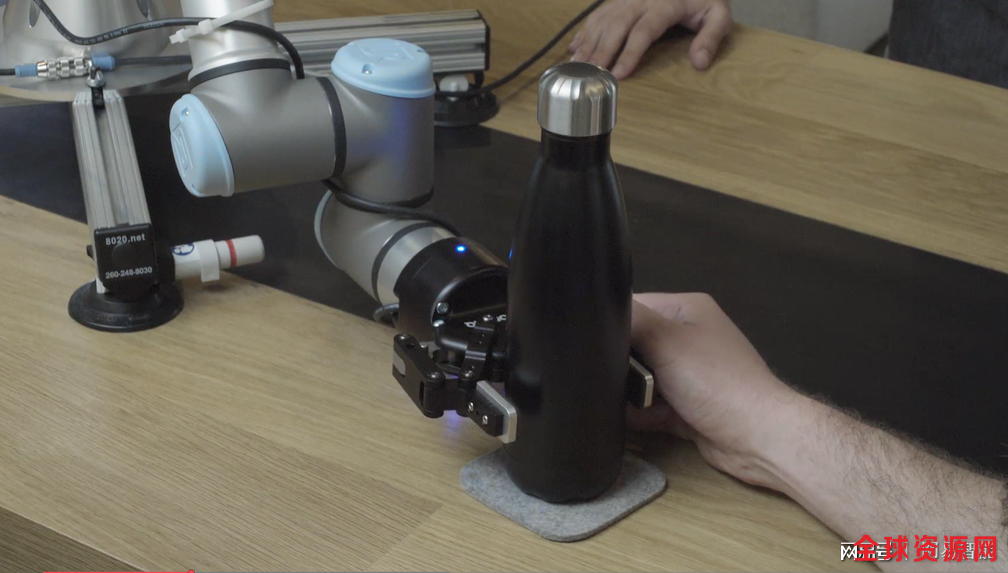
尽管Goldberg的新系统绝对是个大新闻,但它并不完美。请记住,当机器人相信自己能够抓取物体时,它的准确度就达到了99%。有时候即使它没信心,它也可能会去抓取,或者就直接放弃了。“所以我们现在正在做的一件事就是修改系统,”戈德堡说,“当它不自信的时候,而不是放弃它,它就会推动这个物体或者戳它,然后移动它,再看一遍,然后抓住它。”非常有意思。现在终于有人要给那些烦人的夹娃娃机一点颜色看看了。